Three ways to Understand the Mixed Product of Vectors! 向量混合积的三种理解
1 Hello!
This property of vector operation bother me for a loooooong time:
Mixed product1: \[ \boxed{ a \cdot (b \times c) = b \cdot (c \times a) = c \cdot (a \times b). } \tag{1}\]
1 Also known as “scalar triple product”.
This says nothing but the mixed product is unchanged under a circular shift.
You will understand it in this article!
2 Three Approaches to the Mixed Product
Once this is established, we can use the fact that: \[ \begin{vmatrix} | & | & | \\ a & b & c \\ | & | & | \end{vmatrix} = \begin{vmatrix} | & | & | \\ b & c & a \\ | & | & | \end{vmatrix} = \begin{vmatrix} | & | & | \\ c & a & b \\ | & | & | \end{vmatrix} \] to prove Equation 1.
Now let’s understand Lemma 1 in three different ways!
2.1 Geometric Approach
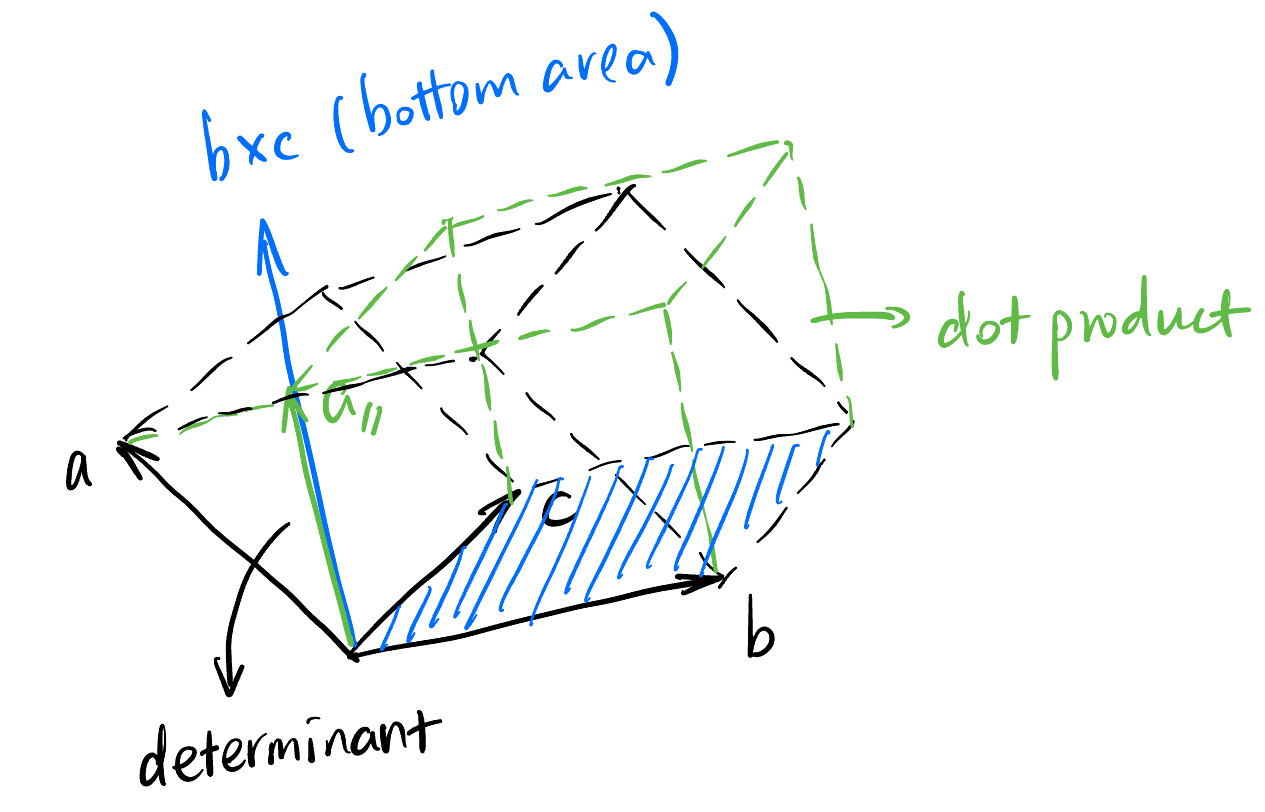
See Figure 1, dot product make the slanted black box straight but maintains its volume.
2.2 3b1b Approach
I called this “3b1b Approach” because this method is inspired by a great mathematician Grant Sanderson. “3b1b” is the name of his Youtube channel.
In a video created by him, there is a very interesting function \(f: \mathbb{R}^3 \to \mathbb{R}\): \[ f(x) = \begin{vmatrix} | & | & | \\ x & v & w \\ | & | & | \end{vmatrix} \tag{2}\] which takes in a vector in \(\mathbb{R}^3\) and output a number in \(\mathbb{R}\) (\(v\) and \(w\) are predefined and fixed).2 Now I claim that:
2 Functions from a vector space to a scalar is often referred to as a functional.
This is trivial.
There is another theorem3:
3 There is a video created by myself that explains this in detail.
Therefore, Equation 2 becomes \[ \boxed{ x \cdot p = \begin{vmatrix} | & | & | \\ x & v & w \\ | & | & | \end{vmatrix} } \tag{3}\]
The Equation 3 gives us a way to write the cross product in a more “dot-product” way: \[ v \times w = \begin{vmatrix} \hat{\imath} & v_1 & w_1 \\ \hat{\jmath} & v_2 & w_2 \\ \hat{k} & v_3 & w_3 \end{vmatrix} \] because the result \(v \times w = (v_2w_3 - v_3w_2)\hat{\imath} + (v_3w_1 - v_1w_3)\hat{\jmath} + (v_1w_2 - v_2w_1)\hat{k}\) is very much like a dot product! Remember \(v_2w_3 - v_3w_2, v_3w_1 - v_1w_3, v_1w_2 - v_2w_1\) are just three numbers unless you you associate each number with a direction.
If you feel uncomfortable with this notation, there is more: \[ \operatorname{curl} F \equiv \nabla \times F = \begin{vmatrix} \hat{\imath} & \frac{\partial}{\partial x} & F_x \\ \hat{\jmath} & \frac{\partial}{\partial y} & F_y \\ \hat{k} & \frac{\partial}{\partial z} & F_z \end{vmatrix} \] where we treat \(\nabla\) like a vector! The first column is just an indicator that the result should be interpreted as a vector not a dot product. I took long time to think \(\nabla\) as a kind of special vector, but I failed. Feel free to ignore the notation \(\nabla \times F\) if you don’t like it!
What is \(p\) then? Well, \(p\) is a special vector in \(\mathbb{R}^3\) such that the dot product with any vector \(x\) gives a number that is equal to the volume of a box spaned by \(x\), \(v\), and \(w\). This is a little bit mouthful, but we can see immediately from Figure 1 that \(p\) is just the blue vector, which is \(v \times w\) in this case! So Equation 3 becomes: \[ x \cdot (v \times w) = \begin{vmatrix} | & | & | \\ x & v & w \\ | & | & | \end{vmatrix} \]
We are done!
2.3 Tensor Approach
Now this explanation requires some knowledge about tensors4. But once you understand it, you will completely change your view on determinants! (If you did not respect them at all in the past anyway.)
4 Just a quick joke, tensors are exactly linear functionals but we allow multiple vectors to be the input (instead of one).
We also have this theorem:
Pick \(n = 3\) and \(k = 2\). This is because in order to get the result of a \(2\)-tensor5 \(B\) acting on any two vectors of dimension \(3\), we would only need to specify the values of \(B\) acting on any \(2\) of the three basis vectors (\(e_x, e_y, e_z\)). How many numbers do we need? Well, only \({3 \choose 2} = 3\) numbers: \[ B(e_x, e_y) = a_{12}, B(e_y, e_z) = a_{23}, B(e_z, e_x) = a_{31}. \]
These are the “basis” of the space \(\bigwedge\nolimits^{\!2} \left(\mathbb{R}^3\right)\). So its dimension is \(3\). Then we just use the bilinear and alternating property of \(B\) to calculate the result of any two input vectors say \(x = 2e_x + e_y - e_z\) and \(y = -e_x + 3e_z\): \[ \begin{aligned} B(x, y) &= B(2e_x + e_y - e_z, -e_x + 3e_z) \\ &= B(2e_x + e_y - e_z, -e_x) + B(2e_x + e_y - e_z, 3e_z) \\ &= -2B(e_x, e_x) - B(e_y, e_x) + B(e_z, e_x) \\ &+ 6B(e_x, e_z) + 3B(e_y, e_z) - 3B(e_z, e_z) \\ &= 0 - (-a_{12}) + a_{31} \\ &+ 6(-a_{31}) + 3a_{23} - 0 \\ &= a_{12} + 3a_{23} - 5a_{31}. \end{aligned} \]
5 This is also called an alternating bilinear form.
6 This type of tensor is also called “volume form”.
As a special case6 when \(n = k = 3\), we have: \[ \boxed{ \operatorname{dim} \bigwedge\nolimits^{\!3} \left(\mathbb{R}^3\right) = {3 \choose 3} = 1. } \]
Let’s think about what this means. The determinant is a very special object that every volume form in \(n\) dimension is just a scalar multiple of it! In other words, every alternating \(n\)-tensor in \(\mathbb{R}^n\) must be the determinant (up to a scalar)! So with Equation 4, both \(g\) and \(\det\) are volume forms! So \(g\) must be a scalar multiple of \(\det\): \[ g = k \det. \]
We can evaluate \(k\) by choosing a very special set of \(a, b, c \in \mathbb{R}^3\), say \(a = e_x, b = e_y, c = e_z\): \[ g(e_x, e_y, e_z) = e_x \cdot (e_y \times e_z) = e_x \cdot e_x = 1, \] \[ \det(e_x, e_y, e_z) = \begin{vmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{vmatrix} = 1. \]
Therefore, \(k = 1\) and \(g = \det\). We are done!