本笔记是本人电子科技大学格院大三《数字信号处理》课程的期末考试复习笔记, 遵循个人学习习惯与轨迹, 不保证严谨性和绝对正确性.
Complex Analysis Basics 复变函数基础
\(\mathcal{Z}\) 变换, \(\mathcal{L}\) 变换
在傅立叶分析中我们用 线性空间和内积 的思维框架来处理信号, 但是在 \(\mathcal{Z}\) 变换和 \(\mathcal{L}\) 变换中, 一般用 级数 来思考.
动机: 复频率的引入
动机很重要, 它决定了今后你对 \(\mathcal{Z}\) 变换和 \(\mathcal{L}\) 变换的 Mental picture.
\(\mathcal{Z}\) 变换和 \(\mathcal{L}\) 变换初看有点不自然, 是因为复频率的引入经历了以下几个重要的数学思想:
不妨都在复数域上看一看 : 这导致了 Complexification 复化 (见 EM Crash Course ) 这个概念. 这将从 “研究复信号的实部” 到 “研究复信号本身”.
复频率的引入 : 由于指数信号和正弦信号都长这样 \(e^{s t}\) (\(s\) 是实数或纯虚数的区别), 我们发现指数增长和振荡的本质在复信号看来是一样的, 干脆让 \(s\) 为复数, 它的:
实部 \(\Re(s)\) 代表指数增长
虚部 \(\Im(s)\) 代表振荡
称 \(x(t)\) 在 \(e^{s t}\) 基上的 Fourier 变换为 Laplace 变换 . (要注意内积的话要取共轭 \(e^{-st}\) )
动机 : 我们可以将「频率 \(\omega\) 」这个概念推广到 \(\mathbb{C}\) 上!
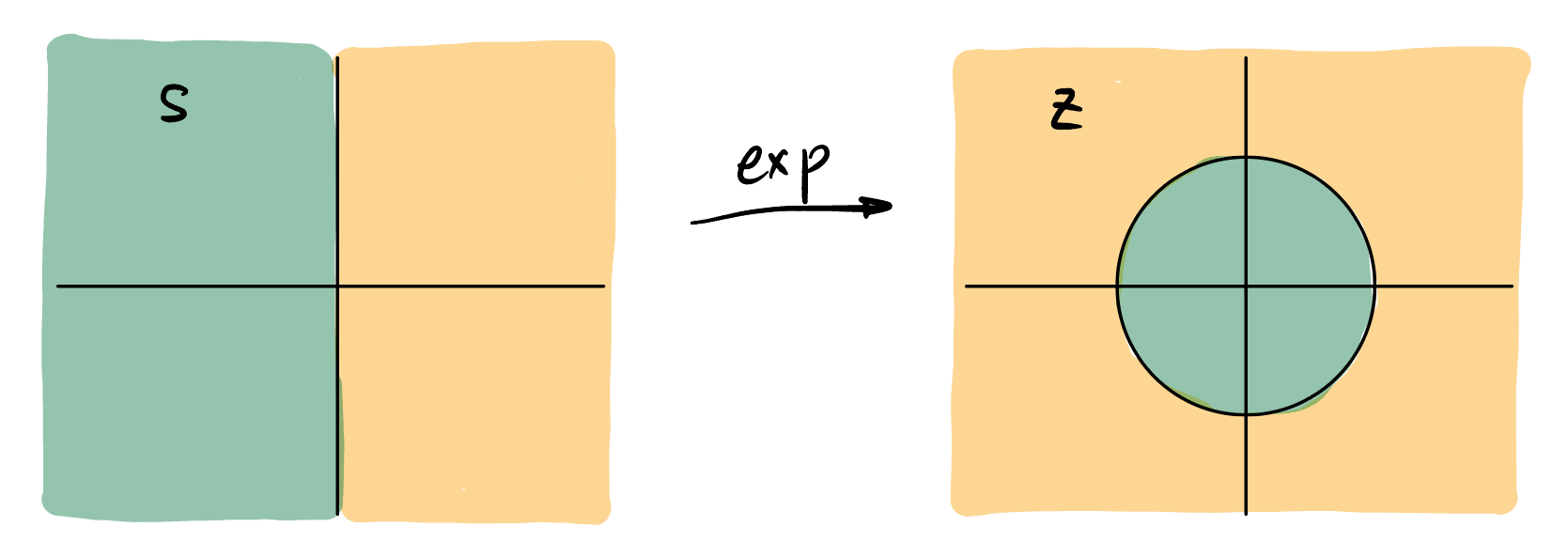
如果是离散时间信号, 频率一定限制在 \([0, 2\pi]\) 之间 , 一个很自然的想法是用一个复数 \(z\) 的:
角度 \(\omega\) 来表示频率
模长 \(r\) 来表示指数衰减
所以
\(\mathcal{Z}\) -Transform\(x[n]\) 都对应一个复变函数 \(X(z)\) : \[
X(z) := \sum_{n=-\infty}^{+\infty} x[n] z^{-n}.
\tag{1}\] \(x[n]\) 作为一个 Laurent 级数的系数. 称 \(X(z)\) 为 \(x[n]\) 的 \(\mathcal{Z}\) 变换
使 Equation 1 收敛的 \(z\) 的集合称为 ROC (收敛域) .
任何一个复变函数 \(X(z)\) 在单位圆上的取值即为 其 Laurent 级数的系数 Fourier 变换的结果.
由对偶性知: 任何一个复变函数 \(X(z)\) 在单位圆上取值的 Fourier 变换的结果即为 其 Laurent 级数的系数.
1 这个复变函数应该在包含单位圆的一个 Annulus 上解析 (holomorphic).
Code
import {PlotContext, ComplexVariable, DomainColoringLayer, glslFunctionMapping} from "39fe342decb60c30" = Inputs. text ({label : "Function f(z)=" , value : "(z-0.5)*(z+0.7)/((z+0.4*i)*(z-0.4*i))" , placeholder : "e.g. (z-i)/(z+1)" = ({phaseColoring : 1 , phaseShading : 0 , magnitudeShading : 0 = PlotContext ({xrange : [- 1.4 , 1.4 ], yrange : [- 1.2 , 1.2 ], width : 0.7 * width, height : Math . max (400 , Math . floor (width * 0.4 ))plot ([DomainColoringLayer (expr, "z" , domainColoringConfig)])
ROC (Region of Convergence) 收敛域
关键信息:
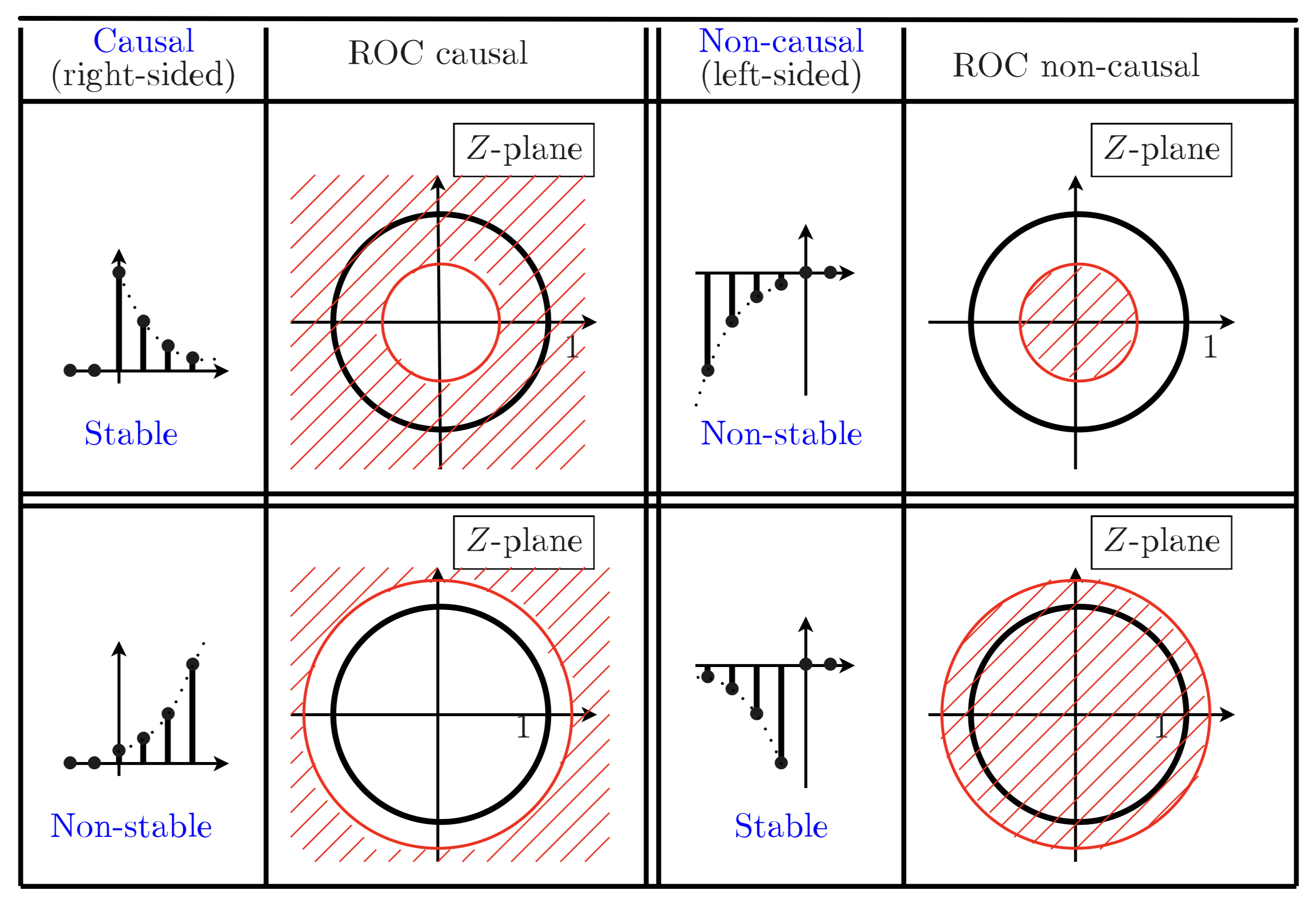
包不包含单位圆 : 包含 -> BIBO Stable向外还是向内 :
外 -> Right-sided
内 -> Left-sided
环 -> Finite-length
Causal 是 Right-sided 的特例, 仅看 ROC 不能判断 causal.
\(s\) 平面右侧 和 \(z\) 平面圆外 为 原信号乘上衰减 的指数信号后 Fourier 变换的结果.
\(s\) 平面左侧 和 \(z\) 平面圆内 为 原信号乘上增长 的指数信号后 Fourier 变换的结果.
ROC 的边界一定有 pole! ROC 的内部一定不包含 pole!
Transfer Function 的分类
Freq 频域上
幅度 \(|H|\) :
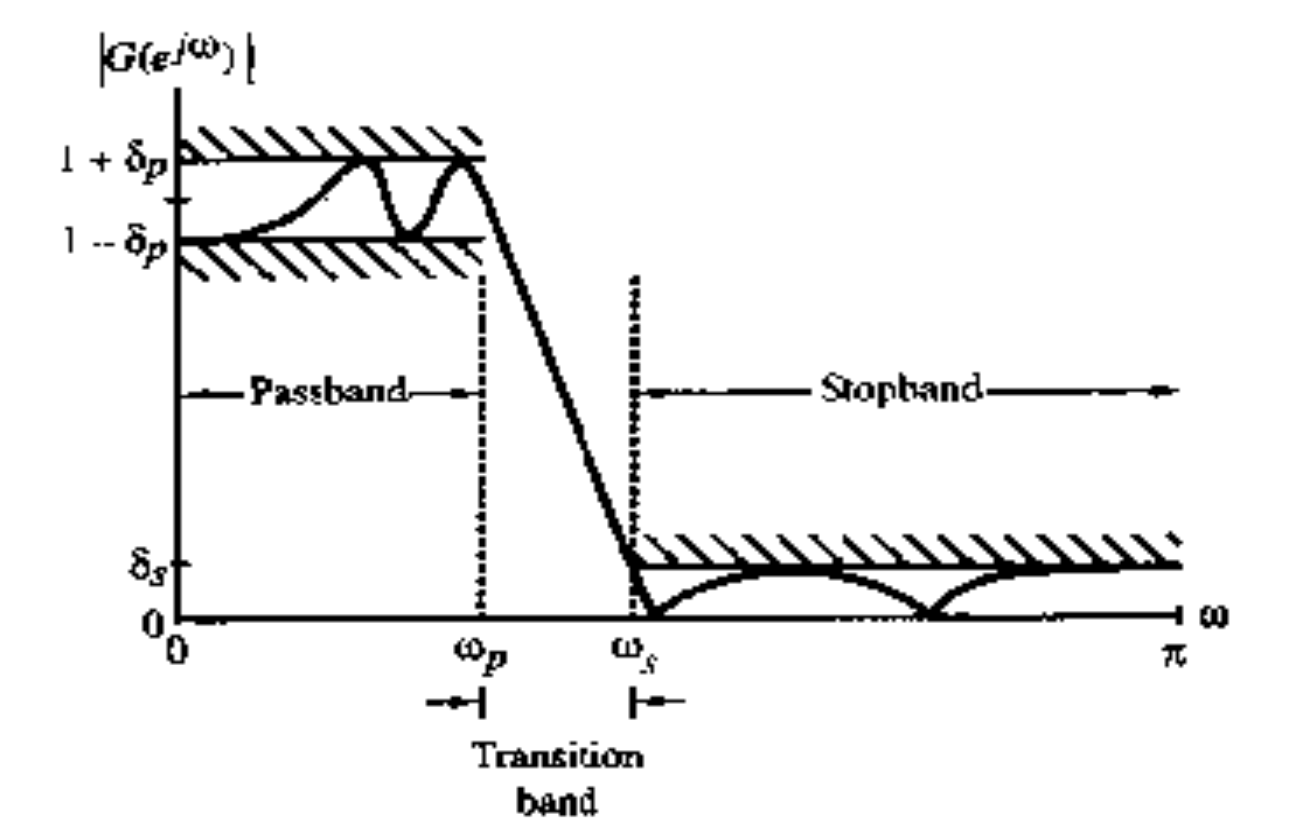
理想滤波器: Passband, Stopband (涉及的概念)
BR (Bounded Real) : 因果、稳定、实系数系统, \(|H| \leq 1\) , 由 Parseval’s 定理知: 能量减少 $ |Y|^2 |X|^2 $ Passive structure .LBR (Lossless BR) : 因果、稳定、实系数系统, \(|H| = 1\) . 能量无损耗.All pass 全通 : 仅仅是 \(|H| = 1, \forall \omega\) .
Mirror-image Polynomial 镜像多项式 : 比如以下两个多项式互为镜像:\[\begin{aligned}D_3(z) &= 1 + 2z^{-1} + 3z^{-2} + 4z^{-3} \\ D_3^{\circ}(z) &= 4 + 3z^{-1} + 2z^{-2} + z^{-3} \end{aligned}\] 实系统 \(H(z) = \frac{B(z)}{A(z)}\) all-pass \(\iff\) \(B(z)\) 与 \(A(z)\) 互为镜像.
我们知道对于实系统 \(H(e^{j \omega})\) , \[
H^*(e^{j \omega}) = H(e^{-j \omega}).
\]
相位 \(\angle H\) :
Group Delay 群延迟 : \(\omega\) 的频率成分通过系统后延迟了多少秒. 反过来思考, 我们知道延迟 \(\tau\) 会导致不同的频点有不同 的相位变化 (乘了 \(e^{-j\omega \tau}\) ), 相位变化为 \(-\omega \tau\) . 那对于一般的系统, 在频点 \(\omega\) 的相位变化就是 \(\angle H(\omega)\) , 如何从中获取 \(\tau\) ? \[ \tau_g (\omega) = - \frac{\mathrm{d} (-\omega \tau)}{\mathrm{d} \omega} = \frac{\mathrm{d} \angle H(\omega)}{\mathrm{d} \omega}. \] Zero-Phase 零相位系统 : \(H \in \mathbb{R}\) 且 \(|H| \ge 0\) . 注意幅值也要非负! 对因果系统不存在??Linear-Phase 线性相位系统 : 就是时域延迟系统 (群延迟为常数), i.e., 波通过系统后在 \(\omega\) 频点上的相位变化 \(\propto \omega\) , 正比系数就是 \(\tau\) , 表现为信号延迟了 \(\tau\) 秒.Minimum Phase 最小相位系统 : \(H\) 的 zeros 都在单位圆内.Maximum Phase 最大相位系统 : \(H\) 的 zeros 都在单位圆外.Mixed Phase 混合相位系统 : \(H\) 的 zeros 在单位圆内外都有.
Digital Filter 数字滤波器
Characteristics 数字滤波器指标
以 LPF 为例, 关键参数:
Tolerance 容差 : \(\delta_p, \delta_s\) .Edge Frequency 边界频率 : \(\omega_p, \omega_s\) .
若不在 \([0, \pi]\) 内, 则需要 数字归一化 : \(\omega_p = 2\pi \frac{F_p}{F_{\text{sample}}}.\)
Let the specified passband and stopband edge frequencies of a digital highpass filter operating at a sampling rate of \(25 \text{ kHz}\) be \(7 \text{ kHz}\) and \(3 \text{ kHz}\) , respectively. We determine the corresponding band edge frequencies of the digital filter : \[
\omega_p = \frac{2\pi (7 \times 10^3)}{25 \times 10^3} = 0.56\pi, \quad
\omega_s = \frac{2\pi (3 \times 10^3)}{25 \times 10^3} = 0.24\pi.
\]
Peak Passband Ripple 峰值通带波纹 : \(\boxed{\alpha_p = -20 \lg (1- \delta_p)}\) , 越小越好.
Minimum Stopband Attenuation 最小阻带衰减 : \(\boxed{\alpha_s = -20 \lg \delta_s}\) , 越大越好.
Design 数字滤波器设计
Objective : 设计出来的必须是 causal 和 stable 的. IIR 和 FIR 的优缺点:
IIR : 一般 lower order, 计算复杂度低, 但要确保稳定. 可想象成反馈系统.FIR : 一般 higher order, 计算复杂度高, 一定稳定. 可想象成开环系统.
IIR 数字滤波器设计
步骤
Convert the digital filter specifications into analog lowpass prototype one. (因为 analog filter 的设计方法有很多表可以查, 更成熟)
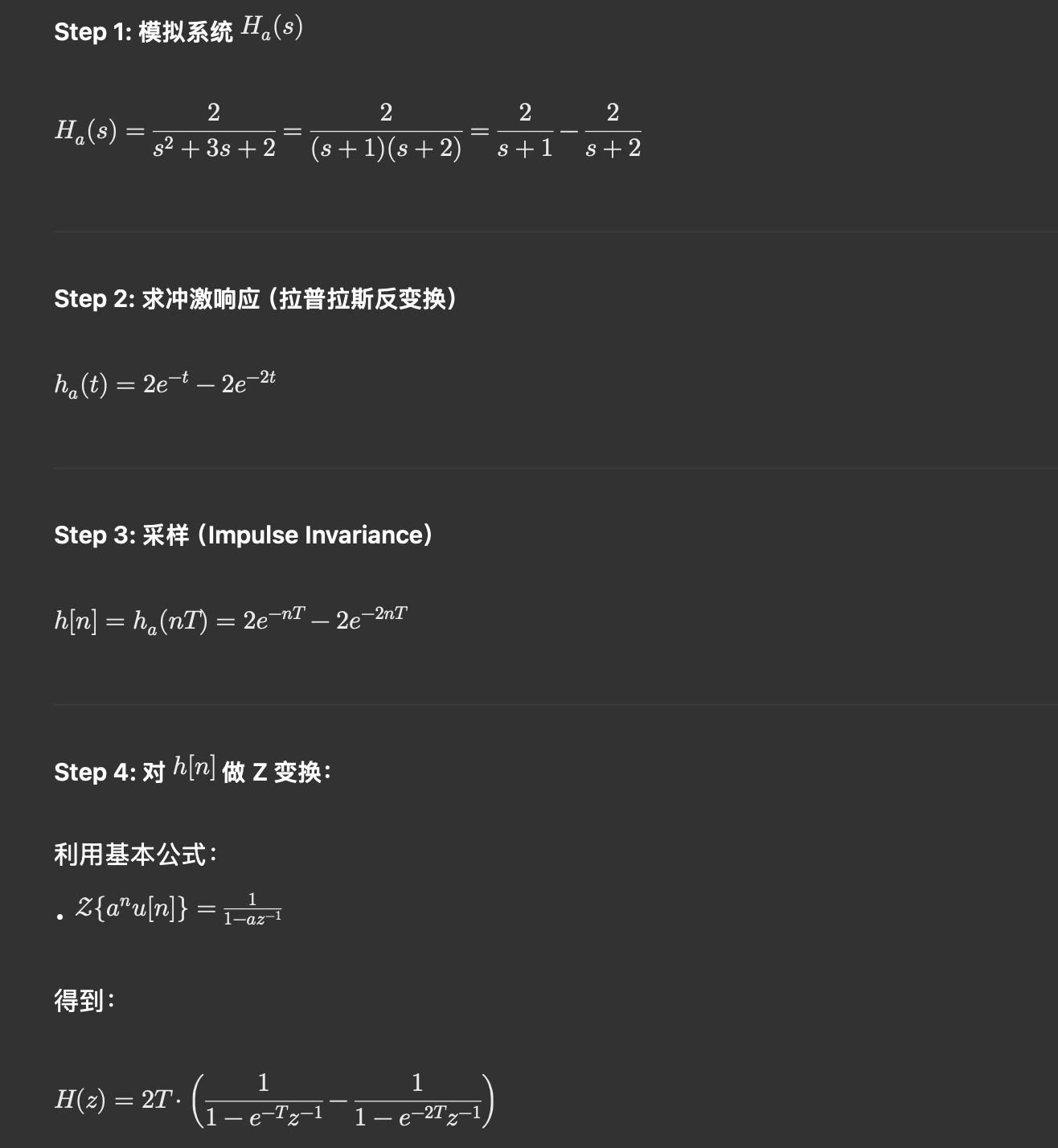
Determine the analog lowpass filter \(H_a(s)\) meeting these specifications.
Transform it into the desired digital filter transfer function \(G(z)\) . (涉及到 \(s\) 域到 \(z\) 域的变换)
Impulse Invariance Method 脉冲不变法 : 数字系统的冲激响应是模拟系统冲激响应在采样点处的取值. (会发生混叠 aliasing)
Bilinear Transformation 双线性变换 :